本ブログの御訪問ありがとうございます
機械設計歴20年以上のtsurfと言います
今回は以下に関する記事です
エアシリンダーの選定 許容運動エネルギーの確認
⇩本記事は機械設計者初心者の方の以下の方にオススメです⇩

未経験機械設計者
エアシリンダの選定で
推力はOKでも
許容運動エネルギの
確認をしなくてはいけないって
どういうことよ
⇩本記事を読むと以下が わかります⇩

許容運動エネルギーをく
確認しないと
エアシリンダの破損の可能性があります
上記を わかりやすく説明します
①結論

エアシリンダ選定の際に 最低限以下が必要となります。
- 出力計算
- 許容運動エネルギー確認
出力計算がOKだからと言って、
許容運動エネルギーまでOKとは限りません。
特に水平搬送の時に注意です。
今回の記事では 許容運動エネルギー確認の解説とともに
どういう場合に 出力がOKでも
許容運動エネルギー確認でNGとなるかを解説します。
②許容運動エネルギー確認とは
以下のような 構成で
ある一定速度で エアシリンダが物体を搬送しているとします。
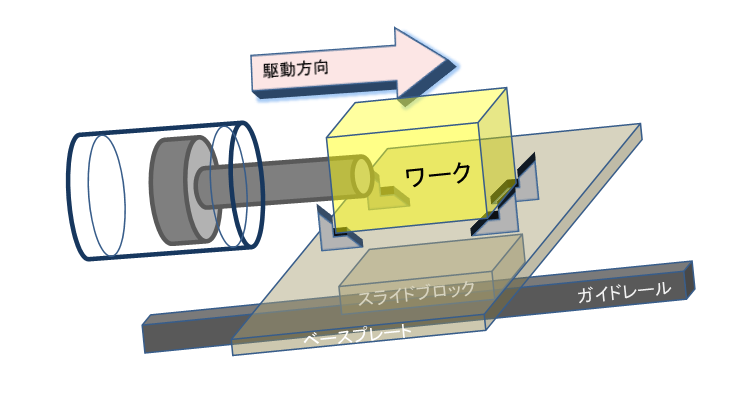
この速度で エアシリンダが搬送地点に着くためにはエアシリンダの
ロッド部がエアシリンダ内の端面の壁に衝突しなくてはいけません
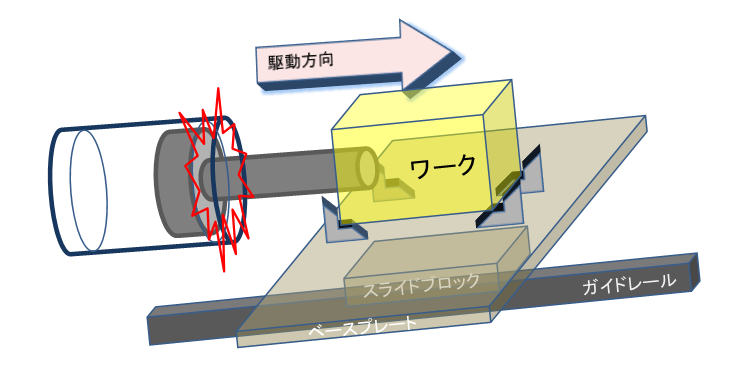
この時に
速度の二乗に比例した衝撃があるのですが
この衝撃を どこまで許容できるかどうかの確認計算となります。
なぜなら エアシリンダーは加工性やコストを考慮し
それほど頑丈にできていません。
従って
許容運動エネルギーをオーバーした設計では
エアシリンダーの破損の可能性があります。
注意点として
エアシリンダーの端面を利用して停止する場合は必ず確認ですが
外部のストッパーを設置する場合は エアシリンダー自体における
許容運動エネルギー確認の必要はありません。
③エアシリンダー側衝撃緩和機構
前説
エアシリンダーには この衝撃緩和対策として
端面部にクッション機構があるのですが 以下に別れます
ラバークッション
特徴
ゴムによるクッション
メリット
- エアシリンダー本体の長手寸法を短くできる
- 安い
デメリット
- 衝撃吸収能力は あまりない
エアークッション
特徴
終端面付近に差し掛かった際に エアの排気を極端に絞り
その抵抗で減速させ 結果として衝撃を小さくします
メリット
- 衝撃吸収能力 大
デメリット
- エアシリンダの長手方向の寸法が長くなる
- 値段も少し高くなる
- 終端面付近で目に見えて遅くなるため タクトに注意
④許容運動エネルギー確認計算
運動エネルギーの計算式
エアシリンダーの運動エネルギーEv(J)の計算式は以下となります
Ev=(1/2)mVs²
m:駆動部の質量合計 (Kg)
※mの内容は後述
Vs:最高速度 (m/sec²)
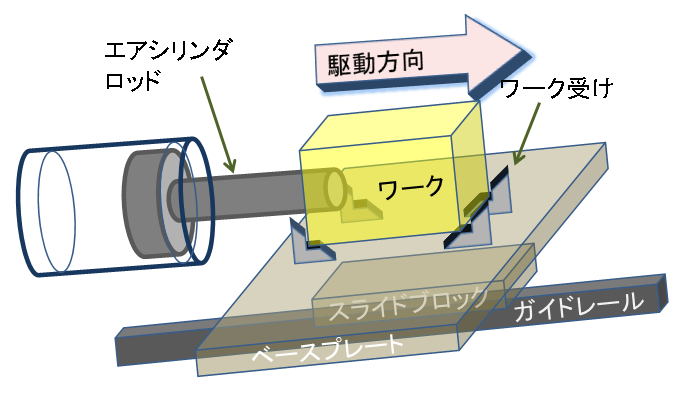
質量mの内容
上記の機構の例の場合 以下の合計となります
| 搬送機構 |
|---|
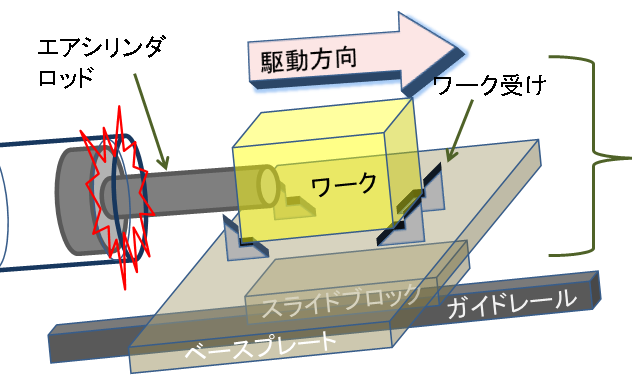 |
| 質量mの内容(以下の合計) |
|
●ワーク ●ワーク受け ●ベースプレート ●ガイドのスライドブロック ●エアシリンダーのロッド |
算出された運動エネルギーについて
上記で求められた 運動エネルギーを
エアシリンダーのカタログに 許容運動エネルギーが記載されています。
従って
カタログ記載の許容運動エネルギーの値より小さいことを確認します
なお 許容運動エネルギーは
ラバークッションでは小さく エアクッションは大きいです
⑤推力OKでも許容運動エネルギーがNG のケース
前説
推力OKなんだから 許容運動エネルギーもOKだろうと思いがちです
しかし
推力はOKでも 許容運動エネルギーがNGという例は
以下の条件下で起こりやすいです
- 使用最高速度が速い
- 水平搬送
この章では
具体的に推力がOKでも 許容運動エネルギーがNGの例をあげましょう
具体例
以下の想定で搬送機構を検討します
| 検討した搬送機構 |
|---|
|
|
| 搬送機構運転条件 |
|
搬送姿勢 水平 摩擦係数 µ 0.1 エア圧力 Pa 0.5(MPa) 想定速度 V 0.2(m/sec) 想定加速時間 t 0.2(sec) 搬送質量 m 6(Kg) |
上記の想定仕様に対して
以下のあるメーカーのシリンダーを仮選定しました
| 出力径 | 16 (mm) |
|---|---|
| 最高速度 | 0.3 (m/sec) |
| 許容運動E | 0.09 (J) |
計算結果
仮選定のエアシリンダの推力 100(N)
搬送必要出力 (以下の合計) 12(N)
直動搬送部の摩擦力 6(N)
加速力 6(N)
こうしてみると エアーシリンダーの推力は十分です
しかし 運動エネルギーをみてみましょう
運動エネルギーEv 0.12(J)
これは
仮選定のエアシリンダーの許容運動エネルギーである0.09(J)を
オーバーしています
従ってこのエアシリンダは使えません
この場合対策としては 次章で解説する内容となります
許容運動エネルギーがオーバーした際の対策
●エアシリンダーの出力径を上げる
👉解説
出力径を上げるとエアシリンダーも大きくなるので
ラバークッションでもクッション性能があがります。
しかし 注意点として シリンダーの出力径を上げると
排気速度も下がるので 最高速度が遅くなります。
●エアクッション付きのものに変更する
👉解説
ラバークッションよりもエアクッションのほうが、衝撃吸収能力は上です。
しかし 以下の問題点があります。
- 使用したいエアシリンダーに、エアクッション付きのものが
ない場合がある - エアクッションを使用すると、シリンダー終端部での速度が、
目に見えて遅くなりタクトに不安が出てくる
上記の問題がある場合は、次の対策を念頭に入れます。
●外部にストッパーをつける
エアシリンダのストロークを少し長くして
シリンダーの端面当りで停止させないように ストッパーにあて止めをします
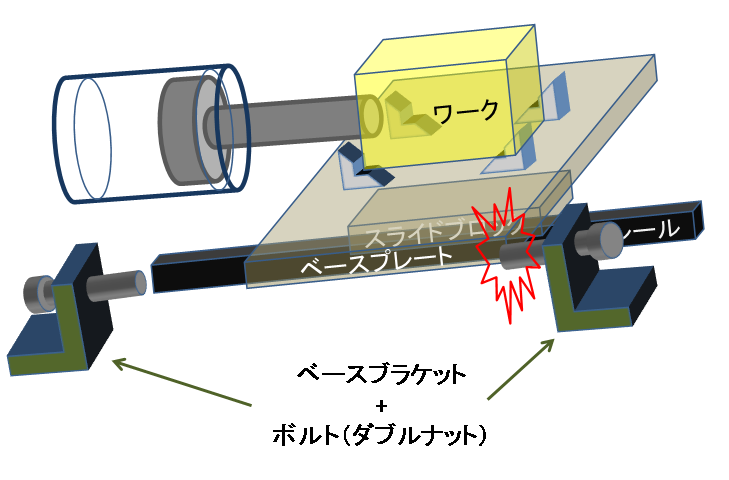
ボルトを使用する理由はボルトの ねじ込み量で停止位置を調整できます
ボルトが緩まないように ダブルナットで固定します。
⑥まとめ
- 基本的にエアシリンダーの構造的には シリンダー内での当て止めです
- 従って 許容運動エネルギーをオーバーするとエアシリンダー本体の
破損につながる可能性があります - 推力がOKでも エアシリンダーの許容運動エネルギーでNGの場合もあります
- どういった状況で許容運動エネルギーがオーバーするかと言うと
水平搬送 かつ 高速搬送の場合です - 理由は 水平搬送時の摩擦力は 重力に比べ、
はるかに弱いため、出力内径が小さめのエアシリンダーを
選定しがちだからです - エアシリンダー選定の際は この許容運動エネルギーの確認を忘れずに
- しかし 最初から停止位置調整のために外部ストッパーを使うのであれば
この許容運動エネルギー確認は必要ありません。
本記事は以上です
最後までお読み頂きありがとうございます