本ブログの御訪問ありがとうございます。
機械設計歴20年以上T.surfと言います。
今回は以下に関する記事です。
【機械要素】
単軸ロボット(ロボシリンダー)における
わかりづらい確認要素
(繰り返し精度とロストモーションの違いなど)
⇩本記事は以下の方にオススメです⇩

ロボシリンダ―
とかの選定でわからない
ところがあるよ
⇩本記事を読むと以下が わかります⇩

カタログだけでは
わかりづらい
要素を解説します。
①2つの位置決め精度
概要
単軸ロボット(ロボシリンダ―も含む)の選定要素の1つに
位置決め精度の確認があります。
そして位置決め精度には2つの位置決め精度があります。
それが以下です。
- 繰り返し位置決め精度
- ロストモーション
本記事では、この2つの違いを解説します。
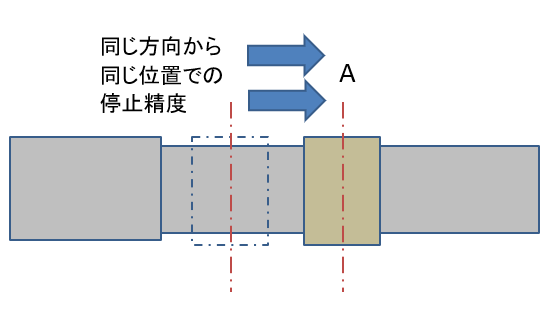
繰り返し位置決め精度概要
同じ方向からある地点へ
移動を行った場合の繰り返しの精度です。
詳しくは後述します。
ロストモーション概要
違う方向から、ある地点へ
移動を行った場合の精度です

詳しくは後述します。
同じ位置決めでなぜ違うのか
同方向と違う方向の位置決めで差が出るのは、
単軸ロボットを動作させるために
単軸ロボットの各機構に種機械的遊びがあるからです。
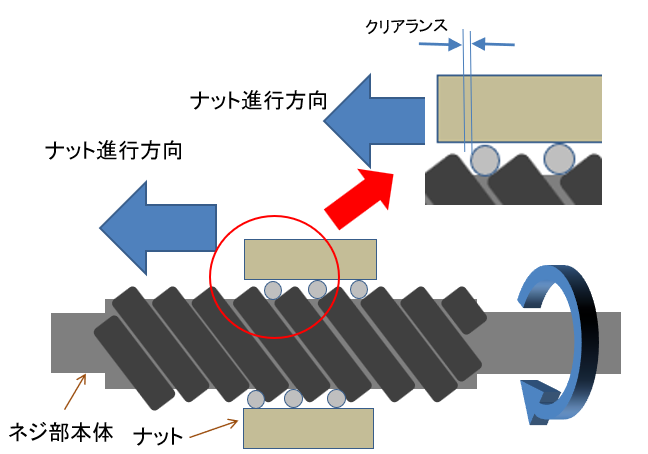
例えばボールネジですが
以下のような微小クリアランスの遊びがあります。

基本的にボールネジ直動機構の場合
ネジの回転でナットのボールを推すことにより、
ナットを移動させています。
従って、ボールネジの回転で動作させ停止させると
動作方向とボールとクリアランスの関係性は
以下ように、
動作方向にクリアランスが出来るようになります。
駆動機構の微小遊びはボールネジだけではないのですが
話が複雑になりすぎても、わかりづらいので
ボールネジに限定して解説をします。
②繰り返し位置決め精度
以下のように
同じ方向からの位置決めの場合の精度です。
従って常に以下図の状態でのの停止精度を見ています。
動作とクリアランスの関係が
同じ状態での停止精度ですので、小さく済みます。
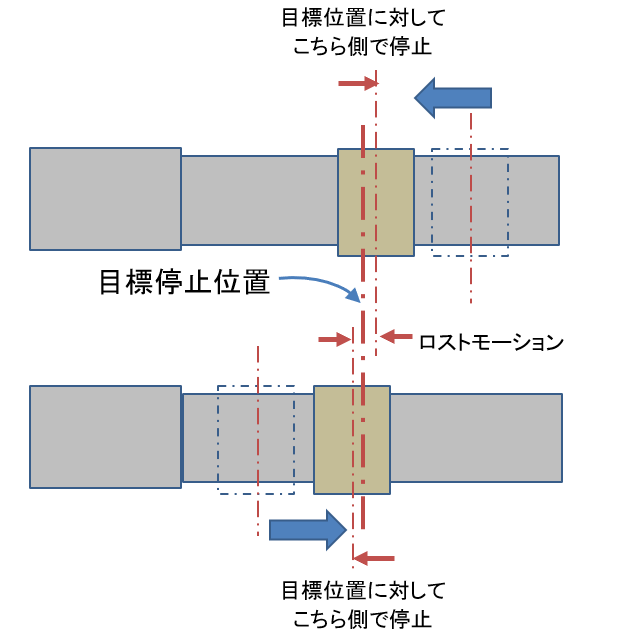
③ロストモーション
概要
以下の図のように違う方向からの位置決め誤差です。
従って、
以下のように、クリアランスの方向が違います。

なので わかりやすいように
大げさに表現するのであれば、以下のように
ナットの停止位置の誤差が大きくなります。
つまり・・・
ボールネジ自体は同じ位置で停止しても
ナットの遊びがあるために
違う方向の時には、クリアランスの向きが違うため
誤差が大きくなってしまうのです。
機械的遊びは ボールネジだけではないので
このような要因が積み重なることによって
繰り返し精度とロストモーションは
停止精度に違いが出てくるようになります。
④ロストモーションが問題の場合の対処法
以下のような現状の位置から
停止位置Aへ移動して位置決めを行う際に
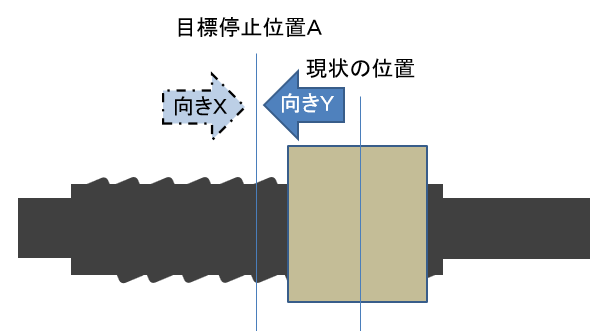
向きYで目標停止位置Aに駆動させた場合
ロストモーションにより位置決め精度が
向きXの場合の停止精度と誤差が大きくなります。
これが問題の場合

じゃあ 使えませんね。
ではなく、
一旦 目標位置Aをオーバーしてから

また 位置決め地点に行く

ということができないかどうかを検討しましょう。
⑤その他の選定要素
基礎的な選定要素
ロボシリンダ―のわかりづらい
基本的な選定要素は以下の記事を御参照ください
- 可搬質量と加速度の関係
- 可搬質量と速度の関係
- ストロークと速度の関係
動的モーメント
動的モーメントについては
以下の記事を御参照ください。
⑥まとめ
- 停止精度は繰り返し精度とロストモーションがある。
- 繰り返し停止精度は、同じ方向からの停止精度
- ロストモーションは、違う方向からの停止精度
- ロストモーションは機械的遊びの関係で停止精度の誤差が大きい
- ロストモーションが問題の場合
一回 目標停止位置を少しオーバーして戻るなどの工夫をする
本記事は以上です。
最後までお読みいただきありがとうございます。