本ブログの御訪問ありがとうございます。
機械設計歴20年以上のtsurfと言います。
今回は以下に関する記事です。
モーターを使った駆動機構で
必要トルク以上のモーターや
不必要そうな減速機が付いている理由
⇩本記事は機械設計初心者の方で以下の方にオススメです⇩

未経験機械設計者
なんかすごい
モーターや
減速機がついているよ
本当に必要?
⇩本記事を読むと以下が わかります⇩

一見すると
適当に選定して
いるように見えるけど
理由があるんですよ
①結論
よく他の設計者の設計において、

なんでこんな
でかいモーターや
減速機が
ついてるんだろ?
と思うような大トルクのモーターや
一見不要に見える減速機がついている
場合があります。
これは適当に設計しているわけではありません。
(もちろん、そのようなケースもありますが)
管理人も実は結果論として
- 必要トルク以上のモーターの選定や
- 一見必要に見えない減速機を付ける
ことが、多々あります。
結論を言うと
駆動機構の全慣性の合計を
モーターの許容慣性モーメント以下
に抑えるため
に結果としてそうなってしまいます。
②モーターの許容慣性モーメントとは
モーターの許容慣性モーメントとは
モーターが許容できる
慣性負荷の合計の大きさです。
これがモーターの許容慣性モーメントより大きいと
短時間での停止が難しくなります。
要は止まりづらくなります。
なお、モーターの許容慣性モーメントは
モーターのカタログにある
と表記されるものが、それにあたります。
③なぜ大トルクのモーターや必要に見えない減速機?
必要以上に大きく見える大トルクの
モーターを選定せざるをえない理由は
大きいモーターほど
許容慣性モーメントが大きいから
となります。
一見必要のないように見える
減速機をつけざるをえない理由は
減速比が大きいほど
駆動系全体の慣性モーメントが
小さくなるから
となります。
特に大きな慣性モーメントを抑えるには
減速機が有効な手段であり、
減速比の2乗分の1となります。
つまり減速比が50の場合
慣性モーメントが脅威の1/2500となります。
例えば以下のようなボールネジ機構の場合
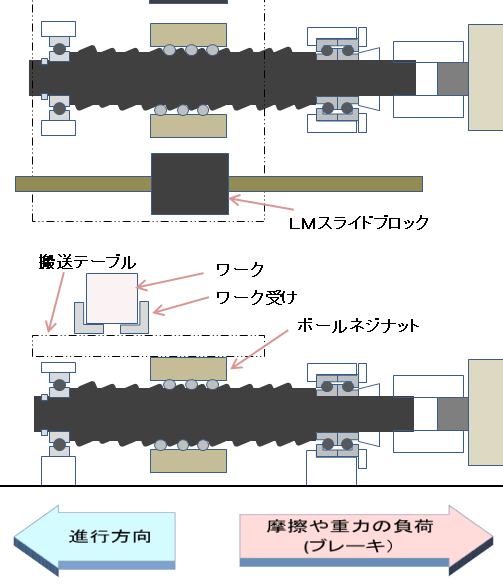
慣性モーメントは以下の式となります。
J={(Js+Jbc) / i²}+Ja+Jb
| 機構全体の慣性モーメント | : J | Kg.m² |
| 減速比 | : i | 無次元 |
| 直動慣性モーメント合計 | : Js | Kg.m² |
| 回転部品の慣性モーメント合計 | : Jbc | Kg.m² |
| 減速機の慣性モーメント | : Ja | Kg.m² |
| ローター慣性モーメント | : Jb | Kg.m² |
詳しくは以下の記事を御参照願います。
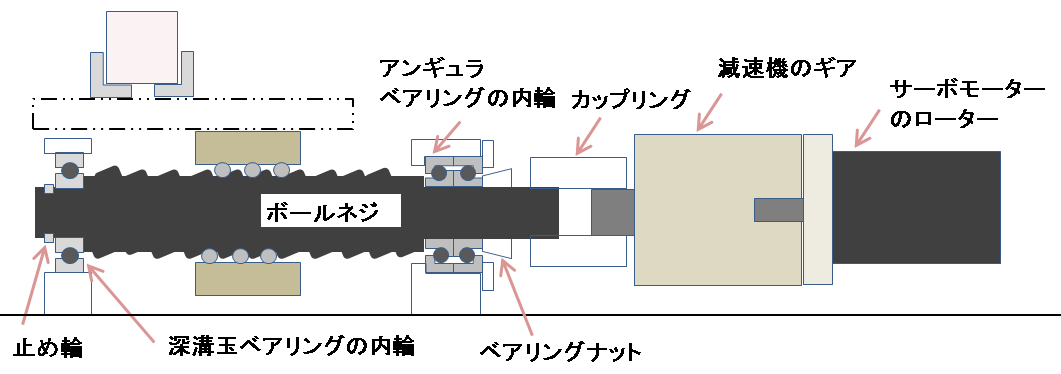
減速機によって減速される以下
- 直動されるワークやボールネジナット
搬送ジグ等の直動慣性モーメント - ボールネジの慣性モーメント
- ベアリングナットの慣性モーメント
- アンギュラベアリングの内輪の慣性モーメント
- 深溝玉軸受けの内輪の慣性モーメント
- 内輪の慣性モーメント
- カップリングの慣性モーメント
上記の合計が減速比の2乗分の1の
対象となります。
以上の式を見てわかるとおり
減速される部分の慣性モーメントは
減速比の2乗分の1になり
大幅に小さな値となります。
④駆動系の慣性モーメントが大きく成りがちな機構
結論から先に言うと
- インデックス回転
- ラック&ピニオン
- ベルト駆動
等が挙げられます。
逆に駆動系の慣性モーメントが
比較的小さくなるのはボールネジ機構です。
これらの違いは何か?
モーター単位回転当たりの移動変化量です。
ラック&ピニオンはモーター1回転当たりの
直動移動量が非常に大きいですよね。
慣性モーメントは回転させづらさですので
ラック&ピニオンなど単位回転の移動量が大きい
ということは当然 慣性負荷も大きくなります。
逆にボールねじのリードピッチは細かいので
単位回転当たりの負荷が小さいと言えます。
従ってこれらの機構には必要以上に
大きいモーターや不要に見える減速機等が
ついている場合が多くなります。
本記事は以上です。
最後までお読み頂きありがとうございます。