本ブログの御訪問ありがとうございます。
機械設計歴20年以上のtsurfと言います。
今回は以下に関する記事です。
サーボモーターと
ステッピングモーターの
機構による使い分けの例
⇩本記事は機械設計初心者の方で以下の方にオススメです⇩

未経験機械設計者
サーボモーターと
ステッピングモーター
の使い分けの指標
みたいなものでも
教えて欲しい
⇩本記事を読むと以下が わかります⇩

あくまで参考ですが
指標ということであれば
管理人の指標を
解説しますが
あくまで管理人の考える
指標ですので
参考としてください
①結論
管理人の経験上から得た
使い分けを解説する前に
サーボモーターとステッピングモーターの
簡単な特性のおさらいをすると
サーボモーター
- 低回転から定格回転域において
安定したトルクが出せる - 許容慣性モーメントが比較的小さい傾向
- 比較的高額
ステッピングモーター
- 低回転で高いトルクが出るが
高回転になるとトルクが下がる - 許容慣性モーメントがαステップ等
製品によっては比較的大きい傾向 - 比較的安価
簡易的ではありますが
以上の理由から以下が導き出されます。
- 高回転で安定した運用がしたい場合は
サーボモーター - 低回転域しか運用しない場合は
ステッピングモーター
ということは-
高回転運用が多いボールネジ機構は
サーボモーターが有利な場合が多い反面、
ステッピングモーターが有利と考える機構は
以下が考えられます。
- ラック&ピニオン
- ベルト駆動
- 回転テーブル機構
何故かと言うと 上記の機構は
1回転あたりの移動量が大きいので
低回転帯での運用が多い場合がある
ということです。
②機構による比較
回転数の比較概要
同じ直動機構で以下の必要回転数を比較しましょう。
- ラック&ピニオン機構
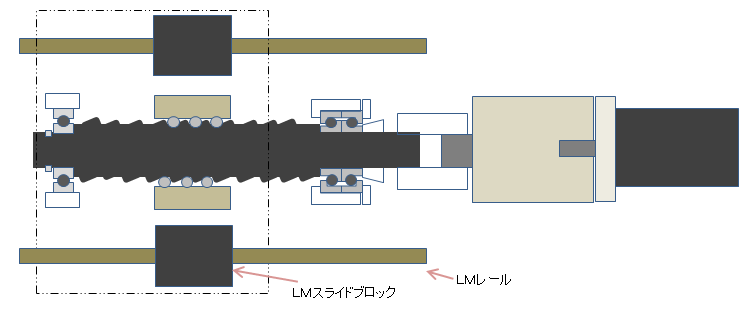
- ボールネジ駆動
直進速度0.1m/secを出したい場合
リードピッチ2mmのボールネジ機構では
必要回転数は3000rpmとなります。
ですが、ラック&ピニオン機構で
基準円直径30mmのピニオンギアを使用する場合の
回転数は63.7rpmとなります。
このように速度だけを見ると
- ボールネジ機構は高回転運用
- ラック&ピニオン機構は低回転運用
となりますが
それだけではなくまとめると以下となります。
| ボールネジ機構 の傾向 |
比較すべきモーター性能 | |
|---|---|---|
| 高回転傾向 | < | 許容回転数 |
| 低トルク傾向 | < | 加速時は瞬時最大トルク 慣性運動は定格トルク |
| 低慣性モーメント傾向 | < | 許容慣性モーメント |
| ラック&ピニオン機構 の傾向 |
比較すべきモーター性能 | |
|---|---|---|
| 低回転傾向 | < | 許容回転数 |
| 高トルク傾向 | < | 加速時は瞬時最大トルク 慣性運動は定格トルク |
| 高慣性モーメント傾向 | < | 許容慣性モーメント |
計算式上の具体的比較
サーボモーター機構の
- 外部摩擦トルクTb(N)
- 直動慣性モーメントIb(Kg.m²)
は以下となります。
Tb=F×(Ph/2π)
Ib=M×(Ph/2π)²
| F | : | 直動物による摩擦力や重力 |
| M | : | 直動される質量合計 |
| Ph | : | リードピッチ |
ラック&ピニオン機構の
- 外部摩擦トルクTr(N)
- 直動慣性モーメントIr(Kg.m²)
は以下となります。
Tr=F×(D/2)
Ir=M×(D/2)²
| F | : | 直動物による摩擦力 |
| M | : | 直動される質量合計 |
| D | : | 基準円直径 |
上記を比較するとー
ボールネジ機構はTb、Ibともに
Ph:リードピッチが小さい上に2πで割るので
小さい値となりますよね。
ラック&ピニオン機構では
基準円直径がリードピッチより大きくなるので
Tr、Irともに比較的大きくなる傾向となります。
ということで・・・・
③比較から言えること
-ボールネジ機構はー
高回転運用だが
求められるトルクや慣性モーメントは
比較的小さくなりがちなので
サーボモーターが向いている傾向がある
ということが言えると思います。
(あくまで傾向)
-ラック&ピニオン機構などはー
低回転運用だが
求められるトルクや慣性モーメントは
比較的大きくなりがちなので
αステップシリーズなどの
ステッピングモーターがコスト的 省スペース的に
有利な傾向があると思います。
(あくまで傾向)
ただし、注意点として
ラック&ピニオンは許容慣性モーメントは
許容慣性モーメントがかなり大きくなる傾向ですので
ステッピングモーターだとしても―
- 減速機付きのものを選定することに
なることが多いと思います。 - 脱調のことを考えるとエンコーダー付きのものが
いいかもしれません。 - また、ステッピングモーターは分解能が粗いので
そのあたりも確認する必要があります。
以上のことを考慮すると、
オリエンタルモーターのαステップあたりが
とてもおススメです。
なぜなら
- ロータリーエンコーダーがつくことにより
脱調レス仕様であること
減速機がつくことにより、
- もともと大きい傾向のある
許容慣性モーメントがさらに大きくなる - さらにステップ角も細かくなる
以上の理由からです。
具体的なモーターの選定計算については
以下の記事を御参照願います。
本記事は以上です。
最後までお読みいただきありがとうございます。