本ブログの御訪問ありがとうございます。
機械設計歴20年以上のtsurfと言います。
今回は以下に関する記事です。
サーボモーターの選定計算
(トルク計算)の基礎
回転テーブル機構編
⇩本記事は機械設計初心者の方で以下の方にオススメです⇩

初心者機械設計者
いや~ 今回も困ったよ。
インターネットでモーターの選定計算式を調べたが、
計算式の原理がわからないので
「実戦で使うのを ためらわれる」
「その時の使用法に適合した計算式か判断できない」
⇩本記事を読むと以下が わかります⇩

回転テーブル機構の
モーター選定を
わかりやすく説明しますが
ボールネジ機構のものより
原理的には簡単です
- ①選定計算の説明用モデル(回転テーブル機構)
- ②結論及び本記事の注意点
- ③外部負荷モーメントTm(N.m)
- ④加速トルクTaの算出概要
- ⑤慣性モーメントMI(Kg.m²)を求めよう
- ⑥角加速度a(1/sec²)を求めよう
- ⑦慣性モーメントと負荷モーメントの違い
- ⑧必要トルク算出と算出された計算結果について
- ⑨まとめ
①選定計算の説明用モデル(回転テーブル機構)
回転テーブル機構の選定計算を説明のためのモデル紹介です。
| 垂直回転テーブル |
|---|
|
|
②結論及び本記事の注意点
結論
選定計算に際して必須な項目を算出します。
- 合計負荷モーメント
- 慣性モーメント
- 角加速度
- 加速トルク(慣性モーメント×各加速度)
そして、必要トルクの計算式は以下となります。
| 必要トルク T(N.m) |
= | 合計負荷モーメント Tm(N.m) |
+ | 加速トルク Ta(N.m) |
本記事の注意点
今回の記事は回転テーブル機構のモータートルク計算ですが
考え方自体は、以下の記事でほぼ語りつくした内容です
それを 御理解頂き
考え方を回転テーブルに応用して頂くだけです
応用内容
ボールネジ機構編に対しての変更点は以下となります
| ボールねじ機構 | 回転テーブル機構 | |
|---|---|---|
| 慣性モーメント | ➡ | 必要 |
| 直動慣性モーメント | ➡ | 必要ない |
| 外部負荷力 | ➡ | 外部負荷モーメント |
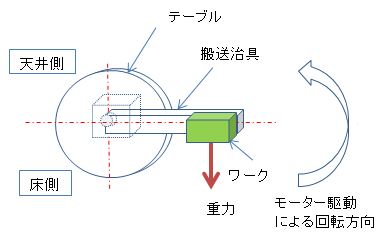
③外部負荷モーメントTm(N.m)
垂直回転テーブルの例

発生する外部負荷モーメントは、
搬送治具とワークです。
この2つは回転軸から離れているからです。
回転テーブルが垂直なので、
働くモーメントは重力によるものとなります。
それにより以下式で表されるモーメントが働きます
| 負荷モーメントMv(N・m) | |||
| Mv=M・g × L |
| M | : | 回転体の質量 | 単位(Kg) |
| g | : | 重力加速度 9.8 | 単位(m/sec²) |
| L | : | 回転軸から回転体物体の 重心までの距離 |
単位(m) |
※補足
テーブルに関しては、
回転中心からテーブル部品重心までの距離が0なので
モーメントは発生しません。
④加速トルクTaの算出概要
ボールネジ機構編と同じです。
以下の式となります。
| 加速トルク Ta(N.m) |
= |
全回転部品の |
× | 角加速度 a(1/sec²) |
⑤慣性モーメントMI(Kg.m²)を求めよう
慣性モーメントとは
慣性モーメントとは、物体の回転させにくさです。
例えば、図1で説明するところの
テーブルや 搬送治具 ワークといった
回転する部品に対して、個別に算出し最後に合算します
慣性モーメントの概念については、
⇩以下の記事⇩をご参照ください。
慣性モーメントの計算
垂直回転テーブルを例に挙げます
上記の例の場合は以下となります
式については 後述の記事を御参照ください
| 回転部品 | 参照する式 | |
|---|---|---|
| サーボモーターの ローター 慣性モーメント |
➡ | モーターの カタログに記載あり |
| テーブル | ➡ | 回転する中実円柱 |
| 搬送治具 | ➡ | 回転中心が 部品の重心より離れている 直方体の慣性モーメント |
| ワーク | ➡ | 回転中心が 部品の重心より離れている 直方体の慣性モーメント |
慣性モーメントの主要な式については ⇩以下の記事⇩をご参照ください
⑥角加速度a(1/sec²)を求めよう
角加速度とは
角加速度については
⇩以下の記事を御参照ください⇩
角加速度の計算
ボールネジ機構の場合ですが
以下の記事となり、その応用です。
角加速度の計算例
実際に角加速度を計算してみましょう。
以下の条件とします。
| 揺動角度∠a | : | 90 | ° |
| 揺動時間t0 | : | 2 | sec |
| 加速時間t1 | : | 0.2 | sec |
| 減速時間t3 | : | 0.2 | sec |
揺動角度を弧度法にします。
∠a(無次元)=2π×(90°/360°)
=π/2(無次元)
※補足
弧度法は一般的な単位はradianですが
radianは、角度によってできる弧線の長さと
半径の比なので無次元です。
では運転パターンを作りましょう。
上記条件より 現在わかっていないのは。
揺動速度であるv”(1/sec)です。

では、上記運転パターンをわかりやすいように
以下にしましょう。
t1=t3なので 以下に置き換えます。

すると、上記グラフより
揺動速度v”は以下で求められます。
揺動速度v”(1/sec)
=揺動角∠a π/2(無次元)÷ (角加速時間t1 0.2(sec)+等角速度時間t2 1.6(sec))
=0.87(1/sec)
よって
角加速度a(1/sec²)
=角速度v” 0.87(1/sec) ÷ 角加速時間t1 0.2(sec)
=4.36(1/sec²)
ここで角速度がモーターの定格回転数以内であることを
確認します。
サーボモーターの定格回転数:3000(rpm)を角速度換算します。
=3000(rpm) ÷ 60 × 2π=314(1/sec)
よって 今回の揺動速度は、定格回転数以内です。
また、
角加速度についても、定格角速度以内であることを
確認してください。
⑦慣性モーメントと負荷モーメントの違い
注意点として
外部負荷モーメントと慣性モーメントは
全くの別物なので、念のため注意点を挙げます。
外部負荷モーメント
力のモーメントのため、
釣り合って 打ち消すという概念があります。
以下の図を参照ください。

回転中心上にテーブルがあり、
その上に中心からの距離が同じ位置に
90°づつ 4ヶ所に同じ質量の棒が設置されています。
このような点対称の時はモーメントが、
打ち消し合い0となります
慣性モーメント
物体の回転しにくさであるので、
図のような状態だからと言っ
打ち消し合って0になることはありません
回転テーブル上で、
回転しているもの一つ一つの慣性モーメントを算出し
その合計をしなくてはいけません。
⑧必要トルク算出と算出された計算結果について
必要トルク算出
冒頭の式にて、
| 必要トルク T(N.m) |
= | 合計モーメント Tm(N.m) |
+ | 加速トルク Ta(N.m) |
となります。
上記から、
おおよそサーボモーターの機種を仮選定します。
カタログ確認
仮選定したサーボモーターについて
以下をカタログで確認します。
| 算出結果 | 比較検証する値 | |
|---|---|---|
| 必要合計トルク | ➡ | モーターのトルク曲線 (モーターカタログ参照) |
| 必要合計慣性 モーメント |
➡ | 許容慣性モーメント (モーターカタログ参照) |
| 必要角加速度 | ➡ | 許容角加速度 (モーターカタログ参照) |
いずれも以下の記事を御参照ください
⑨まとめ
- 回転テーブル機構のモーター選定計算自体は難しくありません
- ボールネジ機構のモーター選定を理解できていればその応用となります
- 外部負荷力の合成が肝心となります
本記事は以上です。
最後までお読み頂きありがとうございます。