本ブログの御訪問ありがとうございます。
機械設計歴20年以上のtsurfと言います。
今回は以下に関する記事です
サーボモーターの選定計算
ボールネジを使った直動機構
歯車やプーリーを使った減速機構の場合の選定計算
本記事は機械設計者の方にオススメです

ボールネジを使った
直動機構で、
歯車やプーリーを使った
減速がある場合の
モーターの選定計算が
わからないよ
⇩本記事を読むと以下が わかります⇩

慣性モーメントの
計算に注意が必要です。
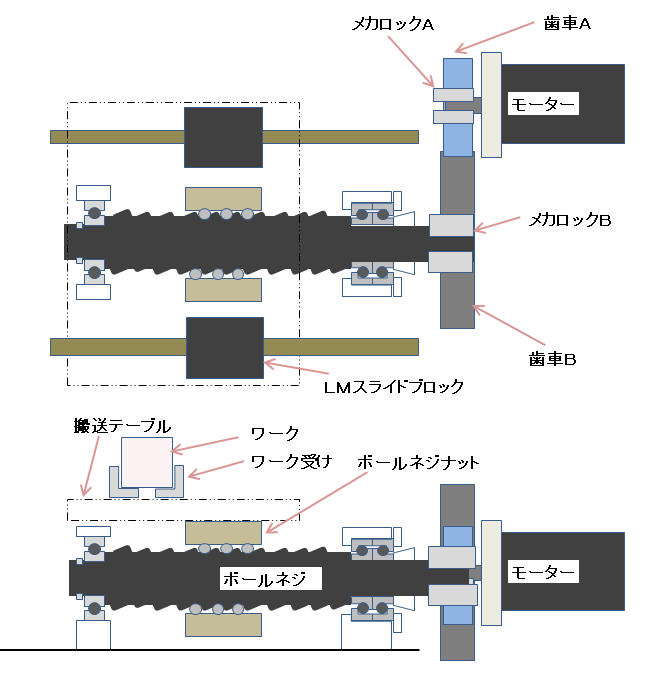
①歯車を使った減速機構付き直動機構モデル
今回は歯車を使った減速機構を用いた
直動機構を例に解説します。
機構の特徴としては以下です。
- モーター軸に歯車Aをメカロックで固定
- 従動軸に歯車Bをメカロックで固定
なお、今回は歯車で解説していますが
プーリーによる減速でも同じとなります。
減速機の原理として
なぜ減速するとトルクアップするのか?
については、以下の記事を御参照ください。
②計算概要
今回はボールネジ機構編での解説です。
に関しては、
以下の記事をご参照ください。
ボールネジ機構に減速機を使用した計算を紹介しています。
これが基本となります。
その他の各機構事の基本的なサーボモーターの選定計算については
⇩以下の記事をご参照ください。⇩
ボールネジ機構編の記事の計算式は減速機を使用した式です。
それに対して以下の変更をしたものです。
- 減速機の慣性モーメント:Jaを削除
- 以下の赤字部を追加
基本的な計算式の原理は上述のリンク記事を参照していただき、
歯車による減速機構特有の原理は後述します。
減速機を使ったボールネジ機構編
に対する変更点まとめ
| Ja | 減速機の慣性モーメントを削除 |
| JHa | 歯車Aの慣性モーメントを追加 |
| JMa | メカロックAの慣性モーメント |
| JHb | 歯車Bの慣性モーメント |
| JMb | メカロックBの慣性モーメント |
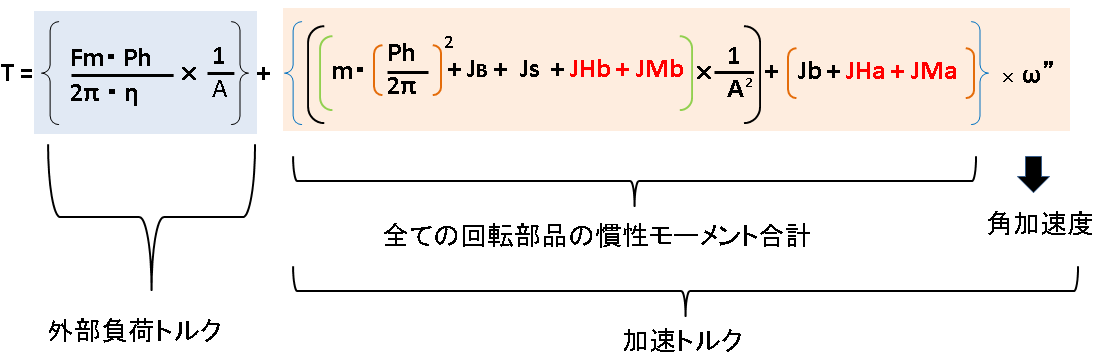
| 内容 | 単位 | 特記事項 | |
|---|---|---|---|
| T | モーターの必要トルク | N.m | |
| Fm | 直動部による外部負荷力 | N | 水平なら摩擦力 垂直なら重力 |
| Ph | ボールネジのリードピッチ | m | 単位換算に注意 |
| η | ボールネジ効率 | 無次元 | 0.9~0.95 |
| A | 減速比 | 無次元 | |
| m | 直動部の質量 | Kg | |
| JB | ボールネジの 慣性モーメント |
Kg.m² | |
| Js | その他回転部品の 慣性モーメント |
Kg.m² |
アンギュラベアリングの内輪 深溝玉ベアリングの内輪 ベアリングナット |
| JHa | 歯車Aの 慣性モーメント |
Kg.m² | |
| JMa | メカロックAの 慣性モーメント |
Kg.m² | |
| JHb | 歯車Bの 慣性モーメント |
Kg.m² | |
| JMb | メカロックBの 慣性モーメント |
Kg.m² | |
| Ja | 減速機の 慣性モーメント |
Kg.m² | 歯車による減速 なので必要なし |
| Jb | モーター軸の 慣性モーメント |
Kg.m² | カタログに記載あり |
| ω" | 角加速度 | 1/sec² |
③歯車を使った減速機構計算式の概要
以下に関しては変更はありません。
- 外部負荷トルク
- 加速トルク=全慣性モーメント × 角加速度
従って、上記に関しては前述のリンク記事をご参照願います。
角加速度の求め方への記事リンクも貼ってあります。
本記事では、慣性モーメントの合計に関する解説のみとします。
慣性モーメントなど基本的なことについては
以下の記事をご参照願います。
④慣性モーメントの式解説
慣性モーメントの式分解
慣性モーメントの式に変更があり、解説します。
慣性モーメントの式は、以下に分解されます。
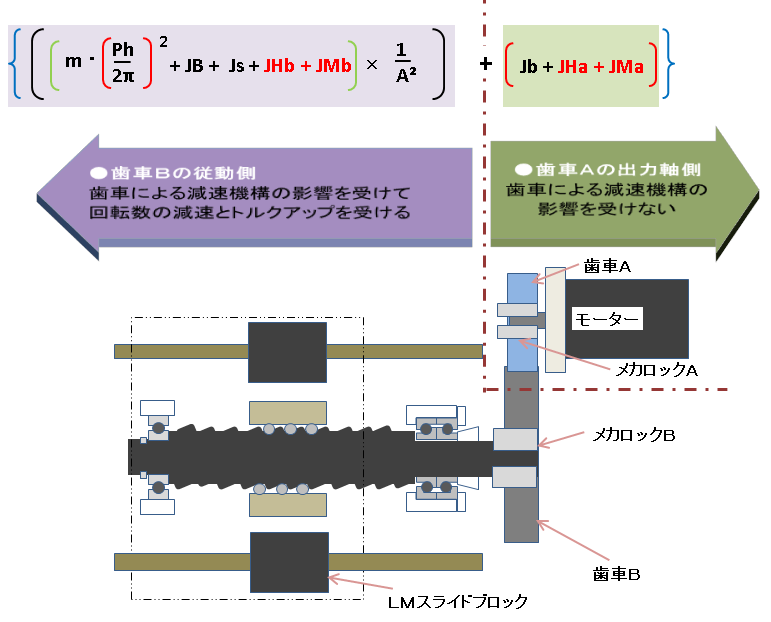
歯車Bの従動側
慣性モーメント
歯車Bの従動側では減速機構により、
影響を受け減速し回転しやすくなっています。
部品としては以下がありますね。
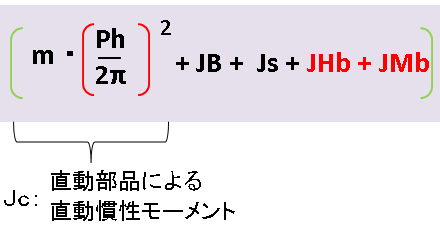
| Jc | ➡ | ボールねじが直動部を直動させる際に発生する慣性モーメント |
| JB | ➡ | ボールネジ自体の慣性モーメント |
| Js | ➡ |
深溝玉ベアリングの内輪の慣性モーメント(小さいので無視) |
| アンギュラベアリングの内輪の慣性モーメント(小さいので無視) | ||
| 止め輪の慣性モーメント(小さいので無視) | ||
| ベアリングナットの慣性モーメント(小さいので無視) | ||
| JHb | ➡ | 歯車Bの慣性モーメント |
| JMb | ➡ | メカロックBの慣性モーメント |
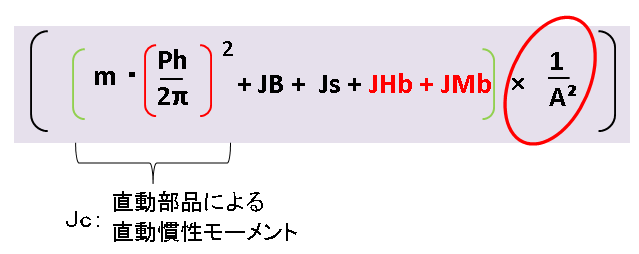
上記に
1/(減速比の2乗)である下記赤丸を掛けます。
歯車A出力軸側
慣性モーメント
歯車Aの出力軸側は 減速機構の影響をうけません。
従って、そのまま以下の部品を拾い出して合計します。
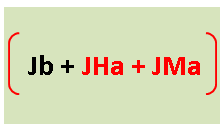
| Jb | ➡ | モーターのローターの慣性モーメント カタログに記載あり |
| JHb | ➡ | 歯車Bの慣性モーメント |
| JMb | ➡ | メカロックBの慣性モーメント |
歯車 メカロックの
慣性モーメント算出
歯車やメカロックの慣性モーメントは
カタログに記載してあれば、単位に注意して
その数値を使用してください。
カタログに記載なければ、
慣性モーメントの計算式については以下を御参照ください。
注意点として
部品の形状を以下近似形状として計算してください。
| 歯車、メカロック | ➡ | 中実円柱の慣性モーメント計算式 |
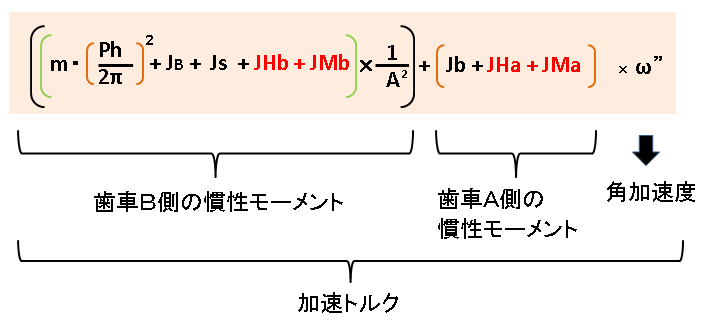
加速トルクの算出
以下の計算をすることにより加速トルクを求めます。
角加速度については、実際は
運転時間と移動距離から
角加速度を求めることになりますので 以下の記事をご参照ください
角速度はラジアン換算してください。
ラジアンは 角度によってできる円周の長さを半径で割った
比なので無次元です。
従って本ブログでは 角速度と角加速度の単位を以下としています。
- 角速度の単位は(rad/sec)ですが (1/sec)とする
- 角加速度の単位は(rad/sec²)ですが (1/sec²)とする
角速度や角加速度 及び弧度法の基礎知識については
以下を御参照ください。
⑤選定計算の後 モーター性能表との照らし合わせ
上記で外部負荷トルクと加速トルクが算出されましたので、
冒頭の式にて 合計して必要トルクを算出します。
しかし、
選定計算を行っても モーター性能表の見方を間違えると
意味がありません。
以下の記事を御参照ください
⑥まとめ
歯車を使った減速機構の計算について
- 基本的には減速機付きのボールネジ直動機構を参照
- 上記が理解できれば、さほど難しくない。
- 歯車の慣性モーメントを追加するだけ
本記事は以上です。
最後までお読みいただきありがとうございます。