本ブログの御訪問ありがとうございます。
機械設計歴20年以上のtsurfと言います。
今回は以下に関する記事です
モーター減速機の基本原理
なぜ減速するとトルクアップするのか?
本記事は機械設計者の方にオススメです

減速機をつけると
なんでトルクが上がるんだ?
⇩本記事を読むと以下が わかります⇩

減速の原理を図で
解説します。
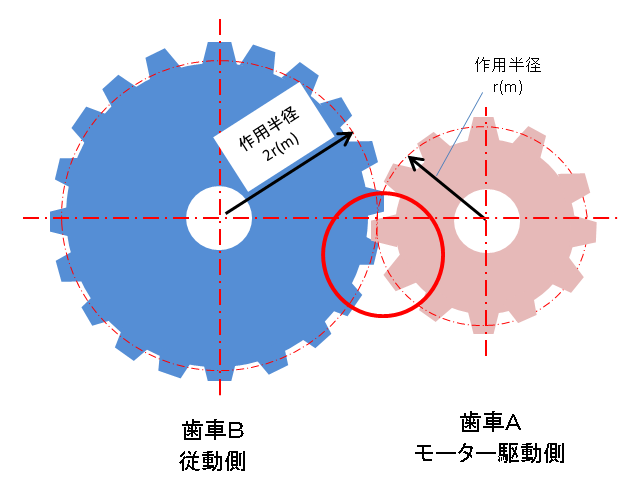
①歯車による減速機構のモデル
解説を簡単にするために
減速比を1/2にする機構で解説します。
| 歯車A | モーターの駆動軸側 | 作用半径r<m> |
|---|---|---|
| 歯車B | 従動側軸 | 作用半径2r<m> |
| モーターの トルク |
||

上記のモデルで
- トルクアップの原理
- 減速の理由
を解説します。
②トルクアップの原理
STEP1
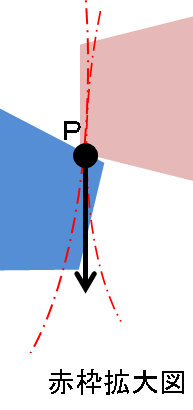
駆動側歯車Aが点Pに及ぼす力
以下の図の赤枠の拡大図における
点Pに作用する力を計算します。
歯車Aはモーターによる回転により、
出力軸となっています。
従って 駆動側歯車Aは点Pを押すことにより
従動側歯車Bを回転させることになります。
では、駆動側歯車Aは
従動側歯車Bを回すために点Pに、どの程度
荷重をかけているのでしょうか?
点Pに掛かるモーター駆動歯車Aからの力F(N)
=モータートルクT(N・m) ÷ 歯車A作用半径r(m)
=T/r(N)
駆動側歯車Aにより、点Pには
T/r(N)の荷重が掛かります。
STEP2
従動側歯車Bが受ける回転力
では次に 従動側歯車Bが受けるトルクを計算してみましょう。
点Pに掛かる力はT/r(N)ですね。
すると この力により歯車Bは回転を始めます。
その回転トルクはT’(N)は次式となります。
従動側歯車B部に発生する回転トルクT’(N・m)
=点Pに掛かる力T/r(N) × 歯車Bの作用半径2r
=2T(N・m)
つまり、
作用半径が2倍になるとトルクが
2倍になります。
③減速する理由
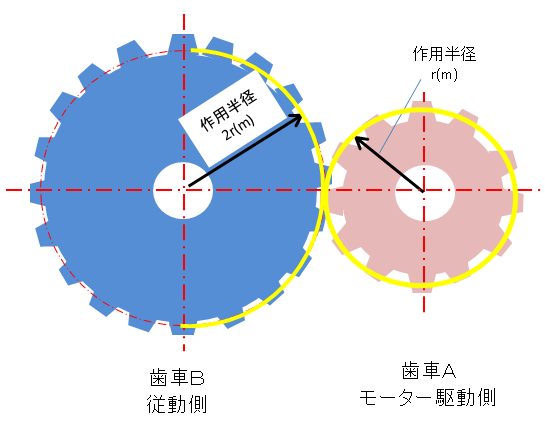
駆動側歯車Aが一回転するとします。
駆動側歯車Aの作用半径の円周は以下の図の黄色となりますよね。
駆動側歯車Aの円周長さLA(mm)=2πr(mm)となります。

しかし、この円周長さを歯車Bに当てはめると
以下の黄色の範囲となります。
なぜなら 従動側歯車Bが1周させるためには
従動側歯車Bの円周長さLB(mm)=4πr(mm)であることから
駆動側歯車Aが歯車Bを回転させる回転量としては
従動側歯車Bを半周しかまわせていないことになります。
つまり、今回の場合
回転速度が1/2となっていることが
わかります。
④つまり・・・
減速機で原則すれば
- 減速比分 トルクがUP
- 減速比分 回転数がDOWN
ということは、減速する前と減速する後では
仕事率(動力)は等しく
変化はしていないということになります。
減速機をつける前
仕事率P<kw>={T<N>× 回転数N<rad/sec>}/1000
=(T・N)/1000<kw>
減速比2の減速機構をつけた後
仕事率P<kw>={2T<N> × (1/2) ・回転数N<rad/sec>}/1000
=(T・N)/1000<kw>
⑤減速の例
概要
自動車がそうですよね。
自動車の場合、減速機ではなく変速機ですが
減速によるトルクアップを、うまく利用しています。
自動車は
発進時にはギア比の大きい低速ギア
高速運転時にはギア比の小さい高速ギア
を使い分けています。
自動車の停止状態
から発進の場合
停止状態から動く時には
摩擦力+加速力という大きな力が必要になります。
従って、
エンジンからの高回転数に対して、かなり大きな減速比のギアを用い
大幅に減速させる代わりに、大きなトルクを得ます。
その代わり、低速ギアでは速度が出ませんよね?
低速ギアで速度を出そうとすると、
かなりの高回転が必要になることにより、以下の弊害があります。
- エンジン高回転による燃費の悪化
- エンジン高回転による騒音
- エンジン高回転によるエンジンへの負荷
- エンジンブレーキも大きくなるため速度維持が大変
自動車の
高速運転の場合
ある程度の速度が出ているので、加速が必要なくなります。
加速が必要なくなるということは
加速力が必要なくなるということです。
本来であれば慣性により、走行するのですが
路面との摩擦力による路面の抵抗力のみになります。
摩擦力は重力より弱い抵抗力なので
それほどトルクが必要なくなるのです。
まとめると
高速走行時には、弱い摩擦力に抵抗できる力のみ
となります。
従って、トルクが出なくなるが、
エンジンの回転に対してダイレクトに回転を伝える
ギア比の小さいギアにしていくのです。
これにより、エンジンが低回転で高速運転が可能となり
上記の運用によって、以下のメリットがあります。
- エンジン低回転による高速走行なので低燃費
- エンジン低回転による騒音の低減化
- エンジンブレーキが小さくなることによる速度維持操作性
⑥まとめ
モーターの駆動機構において
減速機構によって減速をすれば
- 減速比の分トルクが上昇する
- しかし、減速比の分回転速度が落ちる
モーターを使った場合の
トルク計算などは以下の記事を御参照ねがいます。
減速機を使った場合も解説しています。
ギアやプーリーを使った
モーター選定時のトルク計算は
以下の記事を御参照願います。
本記事は以上です。
最後までお読みいただきありがとうございます。