本ブログの御訪問ありがとうございます。
機械設計歴20年以上T.surfと言います。
今回は以下に関する記事です。
機械設計に使う
光電センサーやファイバーセンサー
検知方式詳細(透過型 反射型など)
⇩本記事は以下の方にオススメです⇩

ファイバーセンサーや
光電センサーの検知方式って
いろいろな種類があって・・・
⇩本記事を読むと以下が わかります⇩

光電センサーやファイバーセンサーの
検知方式を解説します。
光電センサーやファイバーセンサーの概要は
以下の記事を御参照ください。
①概要と結論
概要
光電センサー/ファイバーセンサーには、
それぞれに以下の検知方式があります。
- 透過型
- 反射型
- 回帰反射型
- 限定反射型
優先すべき検知方式
優先で検討すべきは透過型です。

受光/遮光かなので検知が非常に安定します。
スペースが確保できるのであれば、
透過型を使うべきです。
反射型などは、スペース的には有利ですが
反射は反射の具合で安定性が少し劣ります。

②透過型
検出方法
投光側のセンサーヘッドから光を出し
受光側のセンサーヘッドで
光を受光するか/非検知物により遮光されるか
で検知をします。

メリット / デメリット
『👉メリット』
- 受光/遮光かなので、検知が安定する。
- 被検知物の形状や色や反射体かどうかに
関係なく検知可能
『👉デメリット』
- センサーヘッドを2つ使用するので
スペースが必要になる - 光軸調整が 少し大変
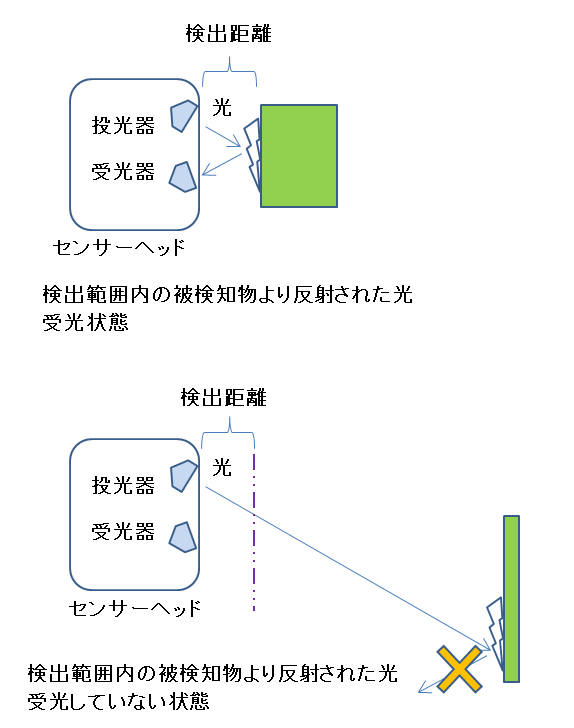
③反射型
検出方法
光電センサーであれば
センサーヘッドに投光器と受光器が内蔵されており、
投光器より投光された光が非検知物に反射をして
受光器で受光することにより検知をします
反射による光を 受光するか/しないか で検知します

メリット / デメリット
この反射型に関しては
メリット/デメリットを説明したいのですが
様々な設定や使用法があり一概に言えないので
各メーカーのカタログを参照してください。
特徴として 以下があります
- 省スペース
センサーヘッド一つのみで済むため、
省スペースです。 - 表面状態を検出できる
色なども検出できます
逆に言えば、表面状態に左右され
検出できない場合もあります。
④回帰反射型
検出方法
センサーヘッドが投光し、
反射板で反射された光は変更フィルターで、
波の向きが変換統一され
その変換された光の受光のみを検知します。
つまり、
被検知物が反射体であっても、
そこから反射された光は検知しません。
あくまで
反射板からの反射光を検知します。

メリット / デメリット
『👉メリット』
- 省スペース
センサーヘッド一つと反射板のみの設置だからです
反射板は小型で薄く設置に困ることは、
そうそう無いでしょう - 透明体も検出可能
投光が透明体を2回通過するので、
透明体の透明度にもよりますが
減衰により検知できる場合があります。 - 背景や被検知物の反射に影響を受けにくい
偏向フィルター付き反射板からの反射光のみ
検出するからです。
『👉デメリット』
被検知物により、一定条件下だと誤検知を起こしやすい
例としては、
被検知物が非常に強い光沢があるもの
光沢が強いと
反射される無偏光も強くなり 無偏光に含まれる
偏光フィルターと同じ振動方向の光も強くなる
⑤限定反射型
検出方法
反射型センサーの
投光と受光に極端な角度を振っており
センサーから至近距離(例 5~20mm等)
の反射性の被検知物を検知します。
メリット / デメリット
『👉メリット』
- 省スペース
センサーヘッド一つで済むからです - 背景や被検知物の反射に影響を受けにくい
偏向フィルター付き反射板からの反射光のみ
検出するからです。
『👉デメリット』
- 被検知物が反射体でなくてはいけない
- 設置が被検知物の至近距離
至近距離設置ができる場合は、デメリットでは
ありませんが、至近距離設置ができない場合は
使用不可となります。
⑥各検知方式に対するライトON/ダークON設定
各検知方式に対するライトON / ダークON
の断線検知を考慮した設定と考え方は
以下の記事を御参照ください。
⑦まとめ
光を使ったセンサーに関して以下の検出方法を解説しました。
- 透過型
- 反射型
- 回帰反射型
- 限定反射型
スペースに余裕があるのであれば、まず透過型を検討すべき
ワークの形状や表面状態に依存せず
受光か遮光かによる安定性のある検出方法だからです。
本記事は以上です。
最後までお読みいただきありがとうございます。