本ブログの御訪問ありがとうございます
機械設計歴20年以上のtsurfと言います
今回は以下に関する記事です
エアシリンダのストローク調整設計(ストッパー ショックアブソーバー)
⇩本記事は機械設計初心者の方で以下の方にオススメです⇩

初心者機械設計者
エアシリンダ-を使った機構で
ストッパーを使っていたり
そのストッパーに
ショックアブソーバーを併用していたり
する機構を見たけど何で?
⇩本記事を読むと以下が わかります⇩

エアシリンダーのストローク特性と
ストッパーをつける理由とケースについて
わかりやすく説明します
- ①結論
- ②エアシリンダーのストロークと精度について
- ③ストローク調整の実際の機構
- ④ストッパー単体のみのストッパーの例
- ⑤ショックアブソーバを併用しなくてはいけない場合
- ⑥ショックアブソーバを併用した場合のストッパー
- ⑦ (補足)ロッドレスシリンダーの場合
- ⑧まとめ
①結論

エアシリンダーにストローク精度はありません
発注ストロークに対しプラス公差のストロークとなります
例えば 以下のようになります
| 発注ストローク | 実際に納品されるストローク | |
|---|---|---|
| 200mm | ➡ | 200mm プラス公差0~+1mm |
ですので 例えば 200mmに対してストロークの精度を求める際
外部ストッパーやショックアブソーバーが 必要になります
では どのような場合において 精度が必要ないのか?
では どのような場合において 精度が必要になるのか?
以下の章で解説していきます
②エアシリンダーのストロークと精度について
ストロークの精度が必要ない場合
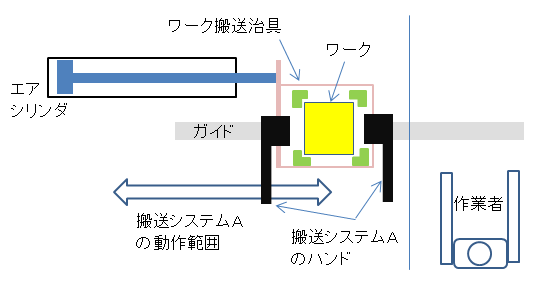
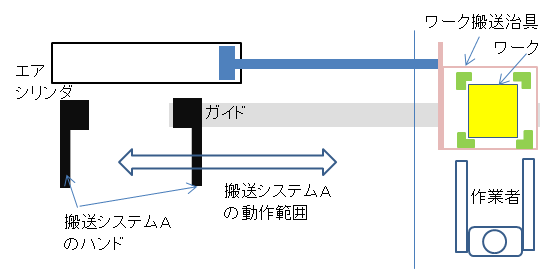
例えば 以下の図のように
搬送システムから ワークを受け取り 最後に作業者に受け渡すだけなら
ストローク精度は必要ありません
| 搬送システムからワークを受け取り | |
|---|---|
|
エアシリンダー 引き込み側
|
|
| 作業者へワークを受け渡し | |
|
エアシリンダー 押し出し側
|
|
⇩あくまで必要な精度⇩
搬送システムからワークを受け取る際の 搬送治具の位置精度のみです
⇩ストロークの精度は不必要⇩
理由は 作業者への受け渡し位置が 1㎜伸びようと関係ないですよね
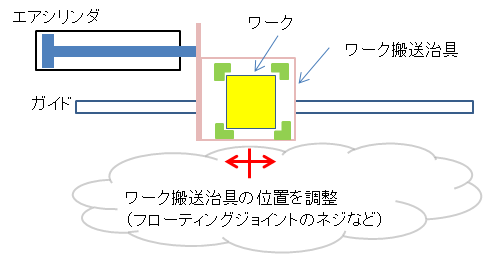
また この時の実際の調整として上述のとおり
ワーク搬送治具の位置を調整するのですが以下の2通りの方法で行います
●ワーク搬送治具のシリンダーロッドへの取り付け位置調整
●エアシリンダーの位置自体の調整
位置精度とともにストローク精度が必要な場合
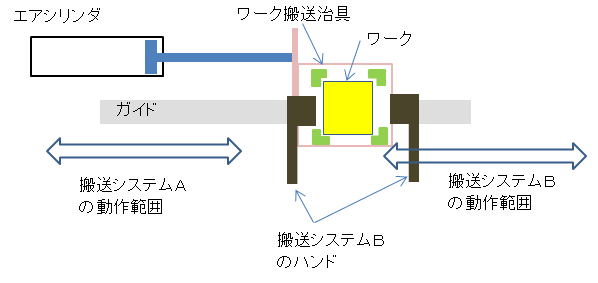
以下の図のように
搬送システムからワーク受け取り 別の搬送システムに受け渡す場合です
このときに1㎜もずれたら ほぼ搬送ミスとなります
| 搬送システムAからワークを受け取り | |
|---|---|
|
エアシリンダー 引き込み側
|
|
| 搬送システムBへワークを受け渡し | |
|
エアシリンダー 押し出し側
|
|

またエアシリンダのストローク調整は
モーターと違い制御ではなく手動調整となります
③ストローク調整の実際の機構
下図のように
エアシリンダが引っ込み状態の 位置調整は
搬送治具とロッドの位置関係の調整か エアシリンダの位置そのものの調整をします
押し出し時の位置調整はストッパーで行います
ストッパー部につしては詳しく後述します
| ワーク搬送治具の位置を手動調整 | |
|---|---|
|
エアシリンダー 引き込み側
|
|
| ストッパーによる手動調整 | |
|
エアシリンダー 押し出し側
|
|
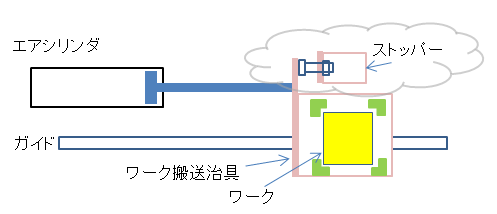
上図のように
ワーク搬送治具に ストッパーで受ける部分を意図的に
設計しておかなくてはいけません
念のため補足をしておきますが
上図の例では ストッパーが必要なのは あくまで押し出し側のみです
引っ込み側は ロッドと搬送治具の位置で調整しているので
ストッパーは必要ありません
④ストッパー単体のみのストッパーの例
ストッパー単体の設計例
詳しくは後述しますが 以下の図のようになります
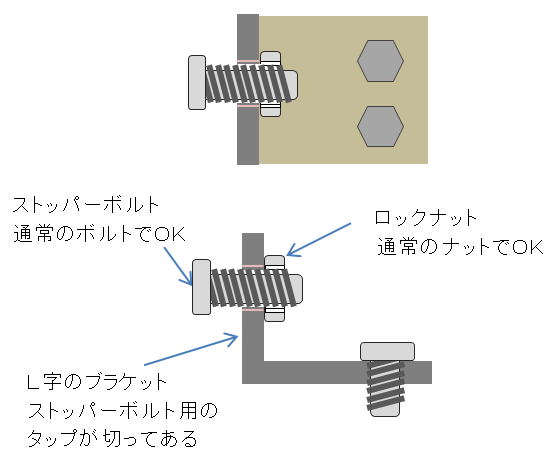
図 ストッパー単体設計例
ストッパーにボルトを使う理由
この例でボルトを使っている理由は
停止位置の調整の際に 以下のメリットがあるからです
●ネジを回すことによりストッパーの位置を調整できる
●ネジピッチが細かいため 微調整ができる
※ネジピッチとはネジ一回転で進む量
●ネジピッチから 後何㎜くらいずらしたいかの見当がつきやすい
例えばM6のボルトだとします
ネジピッチは1㎜のため 後0.5㎜後ろに下げたい場合 ネジを半周回せばよいのです
ナットの理由と役割
L字のブラケットにタップが切ってあるはずなのに
ナットがあるのは 固定のためです
タップにボルトを ボルト頭まで入れず 途中で止めると固定できません
ぐらついて どんどんボルトが移動していき ストッパーの役割を果たせません
このナットがあることで ボルトは任意の位置で固定されます
このような ナットをロックナットといいます
ですので調整の際はこのナットを ゆるめてからボルト調整します
⑤ショックアブソーバを併用しなくてはいけない場合
許容運動エネルギーをオーバーしている場合
エアシリンダの選定項目にもあるのですが
ワークとワーク搬送治具の運動エネルギーが
エアシリンダの許容運動エネルギーを越えてしまった場合です
ワークが重く 水平搬送かつ 最高速度が速い時等に多いのですが
この場合に ショックアブソーバーを併用します
⇩許容運動エネルギーについては 以下の記事を御参照ください⇩
エアクッション付きのエアシリンダーではNGな理由
対策の選択肢の一つとして
エアクッション付きのエアシリンダーがあります
しかし
ストローク調整機構を組み合わせる時には
エアクッションではNGとなりまが 以下に理由を解説します
⇩ ⇩ ⇩
エアクッションは
エアシリンダの ストロークエンドから 5㎜程度しか効きがありません
ですので
例えば1㎜ストロークの長い エアシリンダが納品されてしまい
その1㎜をストッパーで調整した場合 エアクッションの1㎜分が効かなくなります
場合によっては調整に余裕を持たせて
意図的に5㎜程度ストロークの長いエアシリンダを 発注する場合もあるでしょう
特にその際には エアクッションは効きません
⑥ショックアブソーバを併用した場合のストッパー
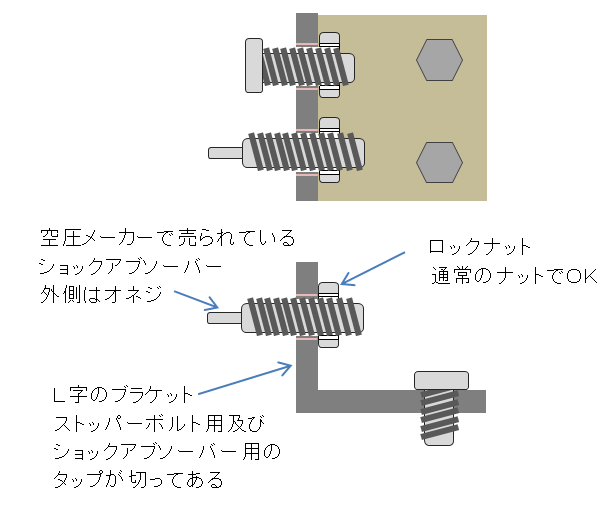
ショックアブソーバーを併用したストッパー設計例
詳しくは後述しますが 以下の図のようになります
設計注意点1 ショックアブソーバーをフルストロークで使用しない
以下のように
ショックアブソーバーのストロークに対して 1㎜ほどストロークに余裕を持たせます
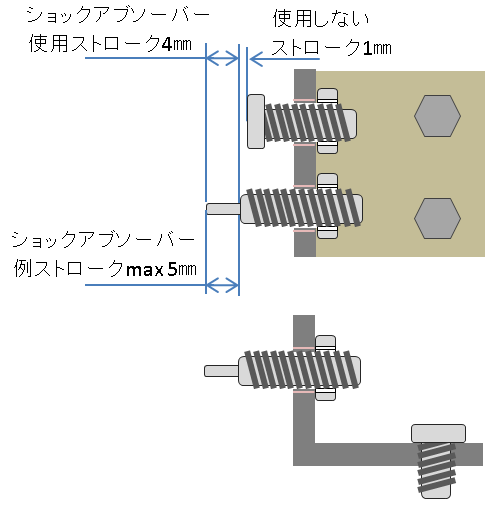
理由ですが
ショックアブソーバーの ストロークエンドに駆動物のストッパー板が
あたると ショックを吸収できず ショックアブソーバー破損の
可能性があるからです
ですのでショックアブソーバも ストッパーボルトと同じ理由で
位置調整用に外側が オネジになっています
設計注意点2 エアクッションと ショックアブソーバーが被らないようにする
エアクッションと ショックアブソーバーの効果が
重複するストローク範囲が出来てしまうため
反発力が強すぎて ストロークエンドに到達できない場合もあります
その場合は以下のようにする必要があります
●押し出し側のエアクッションは 絞り弁を緩ませて効かなくさせる
●エアクッションなしのタイプにして両側 にショックアブソーバーをつける
⑦ (補足)ロッドレスシリンダーの場合
ロッドレスシリンダーの場合は 購入時 型式指定により
ストロークを調整するユニットを
ロッドレスシリンダーに組み込むことが可能です
⑧まとめ
●エアシリンダーのストロークに精度はありません
●エアシリンダーのストロークはプラス公差で作成されます
●ストロークに精度が必要な場合と必要でない場合があります
●ストローク精度が必要ない場合は 作業者にワークを受け渡す場合など
●ストローク精度が必要な場合は 搬送システムから別の搬送システムへの中継
●ストローク精度が必要な場合は外部のストッパーを設置します
●場合によっては ショックアブソーバーも併用します
●その場合は エアクッションは片側のみとします
本記事は以上です
最後までお読みいただきありがとうございます